IT기술의 발전은 자동차 분야의 발전에도 많은 영향을 주어 새롭게 진화되어 나가고 있다. 특히 안전 시스템의 첨단화는 지능형교통 시스템(ITS)과 연계되면서 교통사고를 사전에 예방하여 교통사고 사망자가 없는 사회를 만들어 갈 수 있는 가능성을 보여주고 있다. 이 중의 하나가 V2V인 것이다. 차량과 차량사이의 통신을 말하는 V2V 시스템은 차량간 통신뿐만 아니라 신호등, 공사 지역, 학교 지역 등을 비롯한 안전운행 지역을 인식하여 예고하여 주고 있으며, 새로운 첨단기술과 융합, 소위 말해서 V2X의 개념으로 진화되어 나가고 있다.
서론
차량 통신 시스템은 차량과 무선통신망이 결합된 대표적인 자동차와 IT의 융합기술로 차량 안전 및 진단, 텔레매틱스, ITS 등 서비스 시장을 형성하며 산업적인 파급효과가 크다. 차량 통신 시스템은 차량내 네트워크(IVN: Inter-Vehicle Network), 차량간 통신 시스템(V2V: Vehicle To Vehicle communication system) 및 차량과 인프라간 통신 시스템(V2I: Vehicle To Infrastructure)으로 구성되어 있으며 본 보고서에서는 차량간 통신 시스템에 관하여 동향분석을 하였다.
IT기술의 발전은 자동차 분야의 발전에도 많은 영향을 주어 새롭게 진화되어 나가고 있다. 특히 안전 시스템의 첨단화는 지능형교통 시스템(ITS)과 연계되면서 교통사고를 사전에 예방하여 교통사고 사망자가 없는 사회를 만들어 갈 수 있는 가능성을 보여주고 있다. 이 중의 하나가 V2V인 것이다. 텔레매틱스와 같은 무선 네트워크 통신을 이용하여 차량속도, 위치, 운행 방향 등의 정보 데이터를 차량들 간에 공유하는 것이 특징이다.
차량과 차량사이의 통신을 말하는 V2V 시스템은 차량간 통신뿐만 아니라 신호등, 공사 지역, 학교 지역 등을 비롯한 안전운행 지역을 인식하여 예고하여 주고 있으며, 새로운 첨단기술과 융합, 소위 말해서 V2X의 개념으로 진화되어 나가고 있다.
지금의 도로는 항상 위험에 노출된 가장 위험한 지역이다. 우리나라의 경우 교통사고로 사망하는 사람은 자동차 1만대 당 사망자 수가 2.8명으로 OECD국가 중 3위이다. 2011년 통계에 의하면 교통사고 사망자가 5,229명이다. 본 분석을 통해 교통사고를 사전에 예방하여 접촉사고나 충돌사고를 획기적으로 줄여 안전한 도로 교통문화를 이룩하는데 도움을 주고 자동차 안전 시스템과 관련된 시스템을 제조하는 자동차 부품회사의 연구개발 및 시장동향 파악에 도움이 되기를 바란다.
기술의 개요
자동차 안전 시스템
가. 운전지원 시스템
자동차의 안전 시스템은 크게 운전지원, 예방안전, 충돌안전 등의 3분야로 분류하고 있다. 운전지원은 운전자에 대한 지원을 주로 하는 것이고, 예방안전은 운전자와 차량의 기능을 지원해서 위험을 회피하는데 주목적이 있으며, 충돌안전은 차량이 충돌사고 시에 피해를 최소화 시켜서 안정성을 확보하는 것을 주목적으로 하고 있다.
자동차 운전과정은 「인지 → 판단 →조작」이라는 일련의 연속된 과정을 밟으면서 안전운행을 하는 것이다. 자동차 운전은 계속 변하는 도로와 교통상황을 재빨리 ‘인지’하고 정확한 ‘판단’에 의해 적절한 ‘조작’을 되풀이하는 것이다. 우선 사고를 가까이 하지 않기 위해서는 적절한 정보의 인지가 필요하게 된다. 그래서 운전지원 시스템 가운데 인지지원을 중요시하고 있다. 그림 1은 예방안전의 방향성 및 사상자 사고의 인적요인 비율을 보여주고 있다.
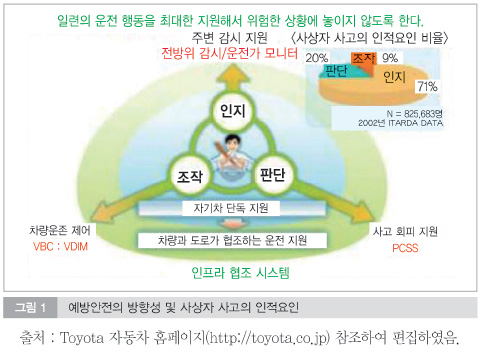
인지 및 판단을 지원해주는 운전지원 시스템은 사고에 가까이 하지 않도록 차량주변의 적절한 정보를 운전자가 알 수 있도록 지원하여 주는 시스템으로 다음과 같은 시스템들이 있다.
▶ HID(High Intensity Discharge Lamp) : ‘가스 방전식 전조등’으로, 기존 할로겐램프와 달리 발광관 안의 제논 가스와 금속 화합물을 20,000V의 고전압으로 방전시켜 빛을 발생시키는 시스템
▶ AFS(Adaptive Front Lighting System) : ‘조명 가변형 전조등’으로, 반대편에서 오는 상대 운전자의 시야를 보호하기 위해 자동차가 움직이는 진행방향으로 조명을 움직여 주는 전조등 시스템
▶ BGM(Back Guide Monitor) : ‘후방 감시 모니터’로 사이드 미러와 룸 미러 대신 소형 CCD 카메라를 장착하여 그 영상을 운전석의 액정 화면에 비춰주는 시스템
▶ NV(Night Vision) : ‘나이트 비전’으로 어둠속에서 적외선 카메라를 이용 물체의 열에너지를 감지하여 운전석 정면 좌측 유리창에 이미지를 투영시켜 위험한 상황을 감지 안정성을 제공하는 시각정보 장치
▶ FSM(Front Side Monitor) : ‘전방 감시 모니터’로 전방 그릴 및 조수석 사이드미러 하방에 설치된 카메라에 의해 사각지역을 모니터에 보여줌으로써 코너링 또는 주차 시에 안전운전에 도움을 주는 시스템
▶ PCSS(Pre-Crash Safety System) : ‘충돌예지 안전 시스템’은 사전에 충돌을 예지하고 충돌에 의한 피해를 경감시켜주는 예방안전과 충돌안전을 융합한 개념의 안전 시스템이다. 진로상의 차량이나 장애물을 검지해서 충돌을 피할 수 없는 상황을 사전에 판단하고 안전장비를 조기에 작동시켜서 충돌피해를 경감토록 한다. 운전자의 인지-판단의 지연을 보완해서 사고 저감과 교통사고 사상자를 줄일 수 있다.
조작을 지원해주는 운전지원 시스템은 다음과 같다.
▶ ACC(Adaptive Cruise Control) : ‘적응순항 제어장치’로서 레이저 또는 밀리파 레이더를 이용한 정속주행 장치의 모든 것을 말한다. 레이더에 의해 차간거리를 검지하여 자차와 앞차와의 거리를 일정하게 유지하면서 차속을 제어하는 시스템이다. 최근에는 전차속역추종기능을 갖춘 ACC가 실용화되고 있다. 0~100km/h의 범위에서 앞서가는 차와의 거리를 적절히 유지해가면서 추종주행을 하는 기능을 갖고 있다. 정체 시 정지와 발진이 계속되는 상황에서는 운전자를 도와서 가속 및 제동 조작하는 부담을 덜어준다.
▶ LKA(Lane Keeping Assist System) : ‘차선유지 보조 시스템’으로서 주행 중 차량이 차선으로부터 벗어날 경우 이를 알려주는 경보 기능 및 차선과 차선 중앙을 주행할 수 있도록 작은 조향력이 스티어링에 연속적으로 가해지도록 제어하여 운전자의 조향 조작을 지원해주는 차선유지 지원기능이 있다. 차량 앞 방향의 차선을 검출하는 카메라 유닛에 의해 차량의 앞 방향 및 가로방향 위치정보를 알려주고, 조향각 센서에 의해서는 스티어링 조향각도 및 자차속도에 따라서 전동 파워 스티어링(EPS: Electronic Power Steering)을 제어해 준다.
▶ IPA(Intelligent Parking Assist) : ‘지능형 주차지원 시스템’은 최첨단 인공지능 시스템으로 주차를 하기위해 기어를 후진에 놓고 모니터에서 ‘주차’를 선택하면 차에 달린 초음파 센서가 차 뒤쪽 공간을 감지해 모니터에 주차할 위치를 표시해 준다. 운전자가 ‘확정’을 누르면 차는 자동으로 후진 주차를 한다. 그동안 운전자는 가만히 있으면서 브레이크 조절만 하면 된다. 횡렬주차 및 종렬주차 등을 모두 차가 알아서 해주는 안전 시스템이다.
나. 예방안전 시스템
예방안전 분야에서는 차량을 제어하여 주행 안정성 확보를 목적으로 하는 ABS(Anti-lock Brake System), TCS(Traction Control System), ESC(Electronic Stability Control) 시스템이 실용화되어 널리 사용되고 있다. 차량이 조종 불능상태가 되어 사고로 이어질 경우에 그러한 불능 상태의 발생을 억제하는 것을 목적으로 개발하였다.
최근에는 제동 및 조향장치 등을 통합적으로 제어하는 이상적인 차량 운동 성능을 높여준 VDIM(Vehicle Dynamics Integrated Management)이 개발되어 일부 신차에 적용되고 있다. VDIM는 엔진, 브레이크, 스티어링 등 각각의 시스템이 단독으로 제어되고 있는 기능을 통합제어해서 이상적인 차량운동 성능과 좀 더 발전된 예방안전성을 목표로 한 시스템이다.
다. 충돌안전 시스템
충돌안전 분야에서는 피해를 최소화 시켜주기 위한 기술로 사고가 일어나기 직전에 밀리파 레이더(Millimeter Wave Radar)에 의해 위험을 미리 인지·판단·회피 조작을 지원하여 주는 시스템으로 PCS(Pre-Crash Safety system)가 개발되어 실용화되고 있다. 사고가 일어나기 직전에 위험을 인지-판단-회피 조작을 지원하는 시스템이다. 전방의 차량이나 장애물을 밀리파 또는 초음파 레이더 등으로 검지해서 충돌위험성이 높다고 판단될 경우에는 운전자에게 경고해서 브레이크 조작을 촉진하고 그래도 브레이크 조작을 하지 않는 경우에는 충돌예지 브레이크를 작동시켜 속도를 줄여주고 만일의 충돌에 대비하여 시트벨트를 당겨주어 승객의 충돌피해를 경감시켜준다.
충돌사고가 일어나고 말았을 경우의 충돌안전 시스템으로는 에어백으로 대표되는 승객 보호 시스템이 있다. 정면충돌, 측면충돌, 후방충돌 등의 충돌 형태에 대해서 보호 시스템은 모두 안정되게 정착되어 사고에 대핸 효과가 인정되고 있다. 교통 약자인 보행자 및 고령자에 대한 피해 경감 대책으로는 충돌시 충격을 완화시켜주기 위한 팝업 후드(Pop up hood)가 채용되고 있다. 또한, 사고 후 승객 및 2차재해 방지 사고통보 시스템으로 충돌 자동 통보(ACN: Automatic Crash Notification) 기술이 개발되어 있으며 일본에서는 헬프 네트(Helpnet)라는 이름으로 서비스 되고 있다.
차세대 첨단 안전 시스템
최근의 자동차산업은 빠르게 발전하는 전자제어 및 IT산업과의 기술 융합을 통하여 기존의 기계식 구동 시스템이 전자화 되면서 정밀제어 및 지능화되어 가고 있다. 교통사상자 제로의 사회를 이루기 위해서는 사람-자동차-교통 환경이 삼위일체가 되어 상호 필요한 정보를 주고받는 네트워크 시스템의 구축으로 교통정보 공유, 모바일 웹 환경에서 무선 인터넷 정보 공유 및 전자 상거래 등이 가능한 환경을 구축하여 나가고 있다.
지능화된 시스템 기술은 첨단 도로 인프라와 융합하여 교통 시스템의 효율을 높이고 사고를 경감시켜 궁극적으로는 무인 자율주행 차량을 실현하게 될 것이다. 또한 GPS(Global Positioning System)와 스마트 폰 등을 이용하여 운전경로, 긴급구난, 인터넷 서비스(뉴스, e-mail, 엔터테인먼트) 및 교통정보 등을 실시간으로 제공하는 텔레매틱스(Telematics) 기술은 시장형성 초기 단계이지만 향후 많은 수요가 예상된다.
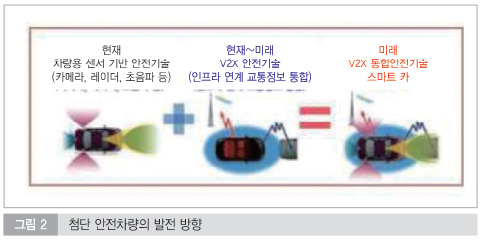
차세대에 등장하는 첨단안전차량(ASV: Advanced Safety Vehicle)은 기계 중심의 자동차 기술에서 전기전자, 정보통신, 첨단교통, 제어계측 등의 신기술을 융합한 미래 교통사회용 차량으로 주변상황을 자동으로 인식하여 주행안전성과 운전자 편의성을 향상시키고 지능형 교통체계 또는 차량정보센터와 연동하여 교통효율을 획기적으로 개선할 수 있는 인간 친화형 자동차이다. 그림 2는 첨단 안전차량의 발전 방향을 예시하고 있다.
IT(Information Technology)를 기반으로 사람, 자동차 및 도로간에 필요한 정보 교환을 위한 네트워크 시스템과 도로와 차량의 자동화를 통하여 기존 도로의 이용효율을 높이고 각종 사고 방지용 안전 시스템을 적용하는 연구개발이 가속화 되고 있다. 이와 같이 첨단안전차량과 도로의 안전 자동화 연구들을 좁은 의미의 ITS(Intelligent Transport System)라 하며, 자동차뿐만 아니라 선박 및 항공기 등의 전체 교통수단을 포괄하여 넓은 의미의 ITS라 한다.
ITS는 여러 분야로 구성되어 있으며, 일반적으로는 첨단교통관리(ATMS), 첨단교통정보(ATIS), 첨단차량 및 도로(AVHS), 첨단대중교통(APTS), 첨단화물운송(CVO)으로 구분할 수 있으며 이러한 분야의 기술개발을 통해 기존 교통 시스템의 문제점을 대부분 해결할 수 있다.
향후 텔레매틱스 기술은 ITS 서비스 확대를 위한 기반을 마련할 것이며 더욱 더 발전한 도로 인프라와 함께 진보되어 나갈 것이다. V2V 통신 시스템을 비롯한 스마트 인프라의 구축과 예방안전 기술들의 융합으로 미래의 운전자는 책을 읽거나 업무를 하면서 편안하고 안전하게 원하는 곳으로 이동할 수 있는 무인 자동운전이 실현되리라고 본다.
연구개발 동향
자동차 통신 네트워크 시스템
자동차 통신 네트워크 시스템은 자동차들 사이에서 신호 또는 데이터를 송수신하는 무선 통신 시스템이다. 자동차를 중심으로 자동차 내부 네트워크와 외부 네트워크로 구분할 수 있으며 자동차 내부 네트워크를 IVN(Inter-Vehicle Network)이라고 부르며, 외부 네트워크는 자동차와 자동차간 통신망(V2V Network)과 자동차와 인프라 간의 통신망(V2I Network)으로 분류된다.
IVN 구성시 유선망은 설치와 유지보수에 번거로움이 있으므로 무선망을 이용한 정보기기의 망을 구축하는 시도가 추진되어 왔다. 여기에 적합한 무선통신기술로는 2.4GHz 대역의 WPAN(Wireless Personal Area Network) 기술의 적용이 연구되었다. 블루투스, 무선 랜, UWB 기술은 IVN에 적용이 될 수 있는 기술로서 블루투스 기술은 핸드프리 서비스, 무선 랜은 핫 스폿(hot spot)에서의 차량 인터넷 서비스에 활용되고 있다.
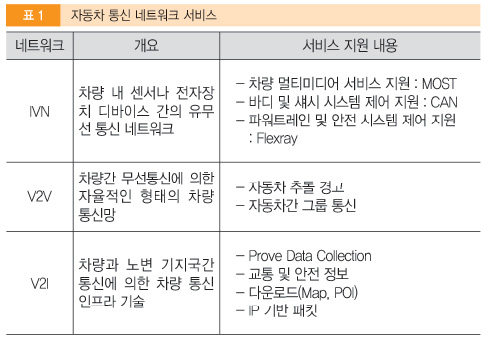
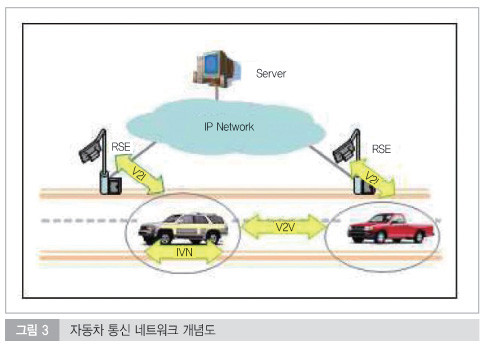
V2V와 V2I는 차량의 안전뿐만 아니라 편의성 관리에도 관련이 있으므로 정부와 완성차업체 그리고 통신업체가 상호 협력하여 기술개발을 추진하는 것이 필요한 분야이다. 그림 3은 자동차 통신 네트워크의 개념을 설명한 것이고, 표 1은 자동차 통신 네트워크의 서비스 종류를 나타낸 것이다.
V2V 통신 시스템은 도로나 교차점 등의 인프라에 배치되어 있는 중계기가 아니고 자동차끼리 직접 정보를 교환할 수 있는 시스템으로 다음과 같은 특징을 가지고 있다. V2V에 사용되는 무선 통신망으로는 Bluetooth, Zigbee, Wi-Fi, Wibro, 3G 등 다양한 근거리전용 통신 등이 할당된 전용 채널에서 무선 기술이 활용되고 있다. 고속 이동차량에서 외부와 연동하여 운전자 안전 정보 및 상업서비스를 제공하기 위한 차량 특화 무선 전송 기술로 끊어짐 없는 영상 전송, 고속주행 중 인터넷 접속 등이 가능한 WAVE(Wireless Access In Vehicular Environment)나 프로토콜인 CALM(Communication Air-Interface Long & Medium range)로 완성도 및 활용도가 더욱 높아지고 있다.
기존의 레이더 기반 통신기술은 직선상에 위치한 물체만 인지할 수 있지만, 무선망 통신을 활용한 통신기술은 직선뿐만 아니라 360° 전 방위 탐색이 가능하다. V2V 통신기술은 시야 확보가 어려운 경우에도 운전자가 방향 및 거리에 대한 제약 없이 다양한 정보를 제공받는 것이 가능하다. 주행 중인 자동차끼리 상호 주행정보를 주고받으며 위험성을 알려 연쇄 충돌 예방이 가능하다. 교통이 혼잡한 도로에서 갑자기 교통 패턴이 변하는 경우, V2V 통신으로 정보를 전달하여 운전자의 신속한 대응이 가능하다.
V2V 통신 서비스는 주행안전 위주의 서비스로서 차량 상태, 주행 상태 및 위치 정보를 기반으로 차량 및 탑승자의 안전이 우선된 원격 고객관리, 위험 경고, 보안 및 안전 서비스, 교통안내 서비스로 구성된다.
V2V 통신 시스템은 V2I 통신 시스템을 통하여 인프라와 통신이 가능하고 차량에 탑재된 통신 모듈을 통하여 차량간 통신을 수행한다. V2V 통신 시스템의 차량 탑재 장비로는 차량 장치 안테나, 단말 플랫폼 및 차량 장치 통신 모듈로 구성되어 있다.
정보통신 단체표준(TTAK.KO-06.0175) 「V2V 통신 요구사항 정의서」에서 규정한 V2V 시스템의 기능 및 성능 요구사항은 다음과 같다.
기능 요구사항
1. 각 차량은 개별적으로 식별이 가능하여야 한다.
2. 통신모듈 및 차량 단말기가 차량의 돌발 상황이나 기타 환경조건에 대해 견고해야 한다.
3. 시간 설정은 1970년 1월 1일 이후 경과한 시간으로의 UTC 기준으로 설정하되, 시간 단위는 microsecond 단위까지 표현할 수 있어야 한다.
4. 경도는 도, 분, 초(소수 7자리)로 표현된다. 양수 값은 동반구 경도, 음수 값은 서반구 경도를 나타내고, +표시는 생략한다.
5. 위도는 도, 분, 초(소수 7자리)로 표현된다. 양수 값은 북반구 경도, 음수 값은 남반구 경도를 나타내고, +표시는 생략한다.
6. 고도는 소수점 이하 2자리까지의 미터 단위로 표시되는데 WGS84 타원면 위의 높이로 나타낸다. 양의 값은 타원면 위의 값이고 음의 값은 타원면 아래의 값이고, + 표시는 생략한다.
7. 차량간 통달거리는 최대 1km까지 가능하여야 한다.
8. 개인의 Privacy를 보장할 수 있는 보안 기능을 제공해야 한다.
9. 차량의 정확한 위치정보를 획득할 수 있어야 한다(인접 차량 포함)
10. 차량 속도에 따라 QoS(Quality of Service)를 보장해야 한다.
11. 돌발 상황 경고 및 응급차량 진입 경고 메시지는 발생시점부터 종료시점까지 주기적으로 방송하여야 한다.
12. 그룹 통신은 고유한 그룹 ID를 가져야 한다.
13. 차량 통신 시스템은 지속적이고 효율적인 업그레이드가 지원되어야 한다.
14. 최대 200km/h의 주행속도에서 차량간 데이터 전송이 가능하여야 한다.
15. 차량 장치간 멀티 홉 통신이 가능해야 한다. 최대 홉 수는 별도로 정한다.
16. 멀티 홉 통신에서 Hop Count 사용이 가능해야 한다.
17. 차량 장치간 양방향 통신이 되어야 한다.
18. 차량 장치간 unicast, multicast 및 broadcast 통신이 가능하여야 한다.
19. 차량 장치간 무선 망 Topology를 실시간으로 파악할 수 있어야 한다.
성능 요구사항
1. 경고 서비스는 최소 2 홉 이상의 멀티 홉 전송을 해야 한다.
2. 차량간 데이터 전송 PER(Packet Error Rate)이 0.1 이하여야 한다.
3. 차량 내에서 안전 메시지 처리 시간은 50ms 이하여야 한다.
4. 차량간 데이터 전송 속도는 최대 10Mbps 전송이 가능하여야 한다.
5. 위치정보는 1초 단위로 업데이트 되어야 한다.
6. 100m 전의 도로상태 및 전방 돌발 상황에 대해 1초 이내에 검지할 수 있어야 한다(시속 200km/h 기준).
7. 돌발 상황 발생시 경고 메시지는 위험 지역에 위치한 모든 차량에게 1초 이내에 전송되어야 한다.
8. 한 메시지 길이는 최대 2K 바이트까지 가변적으로 처리할 수 있어야 한다.